工业相机这玩意儿,在自动化产线上就像一双“火眼金睛”,检测、测量、引导,样样都离不开它。但你可别以为,把这高级相机买回来,插上电就能直接使唤——原厂自带的软件往往只能干点最基础的活,真想让它在你的特定产线上大显神通,比如精准测量一个异型零件的3D尺寸,或者从一堆杂乱零件里识别出特定型号,那就非得进行“工业相机的二次开发”不可-8。说白了,就是咱们开发者利用相机厂商提供的软件开发工具包(SDK),自己动手丰衣足食,打造出量身定制的视觉应用。这个过程,既是挑战,也是让设备真正产生价值的核心所在。
搞开发就像打仗,粮草先行。第一步,你得把家伙事儿备齐了。通常,相机厂商都会提供SDK,比如大恒的Galaxy SDK、海康的SDK等-1-7。下载安装好后,你手头就有了调用相机所有功能的“钥匙”。接着,就是搭环境。无论你是用C++在Visual Studio里捣鼓-3,还是用C在WinForms上设计界面-1,亦或是追求更高性能和内存安全的Rust高手-4,都得确保SDK、编译环境(像CMake-3)、还有必要的图像库(比如OpenCV、Halcon-1-3)都妥妥地安装配置好。光装好还不行,把OpenCV、PCL这些库的路径正确添加到系统环境变量里,是避免后续一堆莫名其妙报错的关键一步-3。准备工作做得细,后面编码调试就能少踩一半的坑。
说到工业相机的二次开发,路径可不止一条,选对了路,事半功倍。传统上,C++凭借其高性能,一直是工业视觉领域的“顶梁柱”,搭配Mech-Eye这类SDK,可以精细控制从连接、采集到高级HDR点云生成的每一个环节-3。而C搭配WinForms或Qt-7,则能更快地搭建出用户友好的图形界面,非常适合需要频繁交互和结果展示的检测站。近年来,一些低代码甚至图形化的机器视觉平台也异军突起,像图漾的RVS平台,通过拖拖拽拽就能搭建视觉流程,大大降低了开发门槛-2;台达的DIAVision平台也集成了大量现成的视觉工具和通讯协议-9。就连树莓派搭配Python和OpenCV,也成为了快速原型开发和轻量级应用的热门选择-10。你看,从底层代码到图形化配置,选择哪一种,完全取决于你的项目复杂度、性能要求和团队的技术栈。
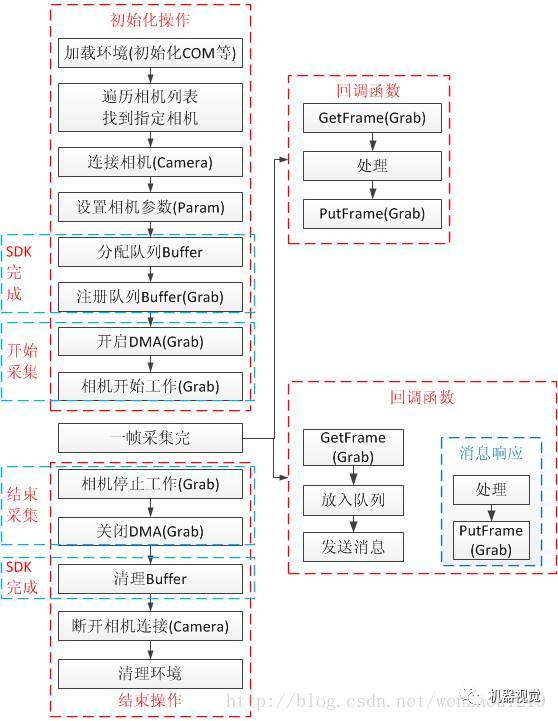
真开始写代码了,你就会发现理想和现实的差距。第一个老大难就是相机的稳定连接与初始化。尤其是网络相机(GigE),IP配置不对、网卡驱动问题、甚至是防火墙,都可能让连接失败。代码里必须要有完善的异常处理和重连机制,毕竟产线上可不能动不动就“掉线”-1。第二个核心是图像采集的流畅与高效。这里有个关键选择:是采用“查询”方式主动去取图,还是设置“回调函数”让相机主动把图推给你?对于多相机或者高帧率应用,回调函数(Callback)模式更能避免数据丢失,保证实时性-7。在Qt这类界面程序中,切记要将从回调函数收到图像数据,安全地转换到界面线程去显示(比如转成QImage),否则程序分分钟崩溃给你看-7。
图像到手,处理起来也是学问。直接处理原始数据(raw data)虽然快,但麻烦。这时,Halcon、OpenCV这些专业库就是你的左膀右臂了。它们提供了从滤波、边缘检测到模板匹配、尺寸测量的全套算法-1。不过,工业相机的二次开发远不止调用几个算法函数。比如,当新旧相机更替导致安装位置和视角变化时,如何用校准工具快速矫正图像畸变和尺度-5?再比如,如何将处理结果(如一个零件的坐标)通过PLC或以太网,无缝发送给机器人或上位机?这些系统集成问题,往往比单纯的图像处理更考验开发者的综合能力。
搞定了单个相机的采集处理,只能说成功了一半。真正的挑战在于,如何让这套视觉系统在车间复杂电磁环境、震动、温湿度变化下稳定运行数年?这就需要在开发后期进行严格的可靠性验证,比如高低温循环测试、连续通电老化测试等-8。另外,程序的维护性也至关重要。清晰的代码结构、完整的日志记录系统-1、以及详细的参数注释,能在未来出现故障时,帮你快速定位问题是出在光、机、电、算的哪一个环节。一个成功的二次开发项目,其交付物不只是一个能运行的exe文件,更是一套稳定、可靠、可维护的视觉解决方案。从“实现功能”到“交付产品”,是开发者思维必须完成的关键跨越。
1. 问:大佬,我刚入门,公司有个项目要用工业相机做零件尺寸测量。看到有C++、C还有低代码平台,到底该学哪个?头都大了!
答:别头大,这个选择完全取决于你的项目背景和个人基础。咱们掰开揉碎了说:如果你的项目对测量速度和实时性要求极高(比如每秒检测上百个零件),并且生产线环境已经定型,未来改动不大,那么C++ 是王道。它直接调用SDK,效率最高,资源控制最精细,但学习曲线也最陡峭-3。如果你的项目需要快速做出一个带漂亮界面、方便操作工进行参数调整和结果查看的检测软件,那么C + WinForms/WPF 或 Qt 是更优选择。它们做界面开发效率高,生态成熟,适合大多数通用测量场景-1-7。至于低代码图形化平台(比如RVS、DIAVision-2-9),如果你做的测量逻辑比较标准,项目时间又特别紧张,或者团队里没有专职程序员,用它就能很快搭出流程,优点就是“快”和“简单”。但对于一些特别复杂的、需要自定义算法逻辑的测量,它可能就不够灵活了。给你的建议是:评估项目对性能和开发周期的要求,再摸摸自己的技术底子。从C入手,可能会是平衡难度和实用性最好的起点。
2. 问:看了文章,觉得二次开发水好深。想系统学习,除了啃SDK文档,有没有更循序渐进的学习路线或资源推荐?
答:感觉到水深是好事,说明你意识到这是个系统工程。光啃枯燥的SDK文档确实容易劝退。我给你规划一条“由外到内”的路线:第一步,先建立视觉系统整体概念。 别急着写代码,去了解一个完整的视觉检测项目包含哪些部分:打光、镜头选型、相机标定、图像处理算法、结果通讯。推荐看看一些行业案例(比如-5里提到的升级案例),知道实际项目是怎么做的。第二步,动手玩起来。 用一些容易上手的工具找感觉。比如,用台达DIAVision或类似平台的试用版,拖拽几个边缘检测、测量工具,感受一下流程-9。或者,用Python+OpenCV在树莓派上接个普通USB摄像头,先实现一个简单的长度测量程序-10。这个过程能帮你建立最直观的图像处理思维。第三步,进入实战。 这时再回头啃SDK。从最基础的例程开始,比如“连接相机”、“采集一张图并保存”-3。务必把每一个例子都自己敲一遍,搞懂每一行代码。大恒、海康等厂商的SDK包里通常都有丰富的例程-1-7,这就是最好的教材。第四步,做个小项目。 给自己定个目标,比如“用C写个程序,能实时显示相机画面,并能手动触发保存图片”。把前几步学的东西串起来。遇到问题就去搜、去问,这个过程成长最快。记住,学习路线就是:概念感知 -> 工具体验 -> 代码深挖 -> 项目整合。
3. 问:我们厂里旧视觉系统是用很老的VB.NET写的,现在想升级,怕二次开发周期太长影响生产。有啥好办法吗?
答:你们这种情况非常典型,也是很多工厂升级时最头疼的。直接重写一套,确实可能面临工期不确定、影响生产的风险。这里有几个思路可以参考:首先,评估“替换”而非“重写”的可能性。 现在很多智能相机或一体化视觉控制器(比如Keyence VS系列-5),其内置的软件功能已经非常强大,图形化编程也简单。或许你旧系统里复杂的VB.NET代码逻辑,用新平台的标准工具组合一下就能实现。先用新平台的仿真工具,用你们保存的历史缺陷图片进行测试-5,如果效果达标,那整个开发风险和时间会大大缩短,甚至可能做到“开箱即用”。如果必须二次开发,采用“分阶段”实施的策略。 不要试图一步到位做出一个完美替代品。可以先利用新相机和新 SDK,开发一个核心的、最关键的检测功能模块,在生产线旁搭个“测试工位”并行运行,与旧系统比对结果。稳定后,再逐步扩展其他功能模块。这样既能验证技术路线,又不中断生产。务必重视新系统的校准和通讯调试。 新旧相机更替,安装位置、镜头视角肯定有变化,一定要利用好新SDK或软件中的校准工具(如九点校准、手眼标定-9),确保测量基准的准确。同时,与PLC、机器人的通讯接口(如Ethernet/IP、Profinet)也要提前测试通。升级的核心目标是“稳”,循序渐进、充分测试是避开泥坑的最好办法。

